







—— DWIN Developer Forum မှ
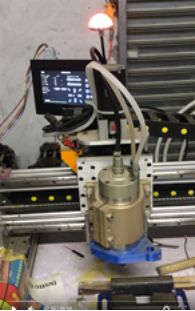
ဖြေရှင်းချက်သည် T5L ချစ်ပ်ကို ပင်မထိန်းချုပ်မှုအဖြစ် လက်ခံထားပြီး GRBL ကို အမှတ်စဉ် 2 မှတစ်ဆင့် ထိန်းချုပ်ကာ X၊ Y နှင့် Z axes များ၏ ထွင်းထုလမ်းကြောင်း အခြေခံလမ်းကြောင်းကို ထုတ်ပေးရန်အတွက် မော်တာအား ထွင်းထုထားသည့် ပင်မအင်ဂျင်ကို ထိန်းချုပ်ရန် မော်တာကို မောင်းနှင်စေသည်။ အလိုအလျောက်ထွင်းထုလုပ်ငန်း။၎င်းတွင်လှပသောအင်တာဖေ့စ်၊ တိကျသောထိန်းချုပ်မှု၊ ဝင်ရိုးပေါင်းစုံထိန်းချုပ်မှုနှင့်အလိုအလျောက်ကိရိယာဆက်တင်များပါရှိသည်။
ဖော်ပြချက်-
1. DWIN အမှတ်စဉ် ပို့တ် 2 မှတဆင့် GRBL ကို ထိန်းချုပ်ပါ။
2. GRBL အမှတ်စဉ်အပေါက်သည် မက်ဆေ့ချ်၊ အပိုင်းခွဲခြင်းနှင့် ကြားဖြတ်ပြသမှုကို သိရှိနားလည်သည်။
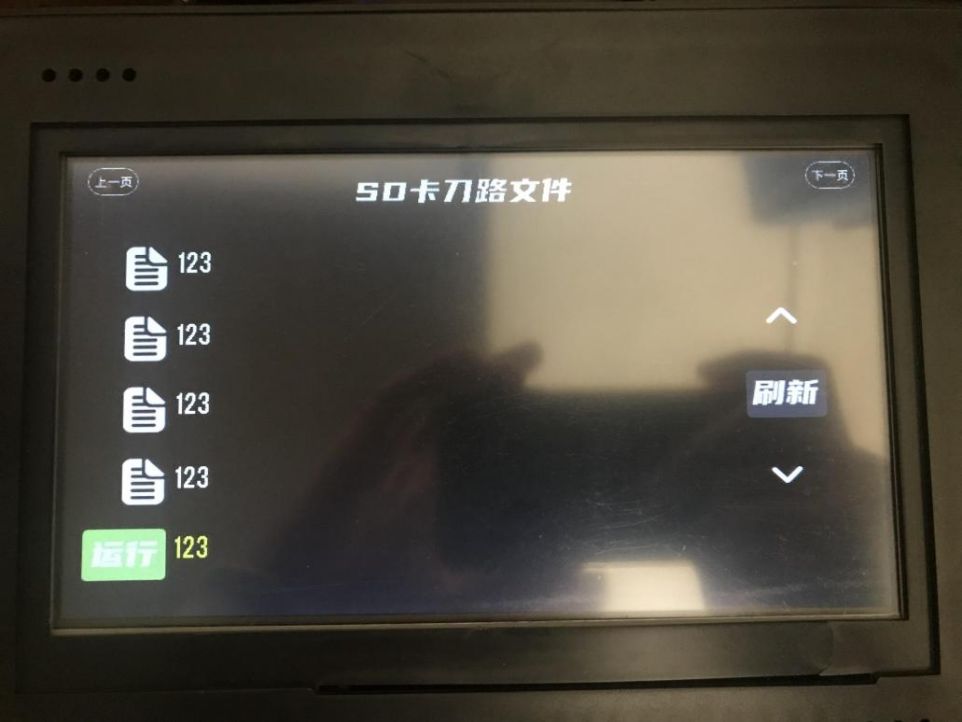
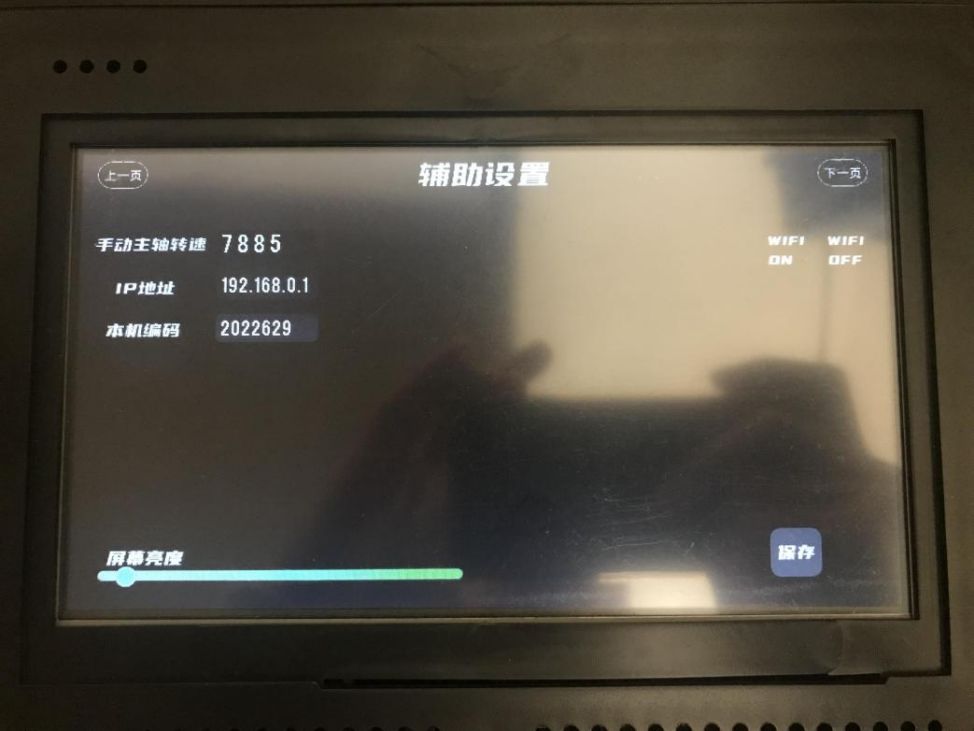
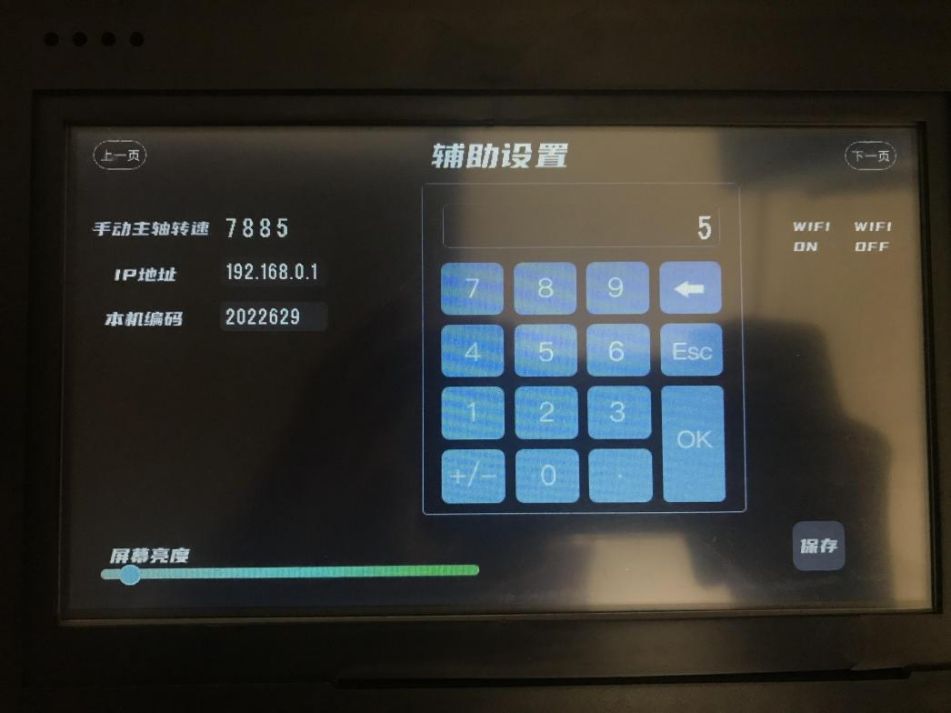
3. စခရင်သည် ညွှန်ကြားချက်များပေးပို့ခြင်းဖြင့် GRBL လှုပ်ရှားမှုကဲ့သို့သော လုပ်ဆောင်ချက်အမျိုးမျိုးကို ထိန်းချုပ်သည်။
4. Weihong handwheel interface အဓိပ္ပါယ်နှင့်သဟဇာတဖြစ်သော handwheel ထိန်းချုပ်မှုကိုပံ့ပိုး;
5. ပါဝါပိတ်ပြီးနောက် စခရင်ဘောင်များကို သိမ်းဆည်းနိုင်သည်။
6. ရပ်နားခြင်း၊ ရပ်တန့်ခြင်းနှင့် အလုပ်စသည့် အခြေအနေကိုပြသရန် WS2812 ကို ထိန်းချုပ်ခြင်းဖြင့်၊
ဖြေရှင်းချက်ဒီဇိုင်း
(၁) DGUS engineering interface ဒီဇိုင်းဆွဲခြင်း။

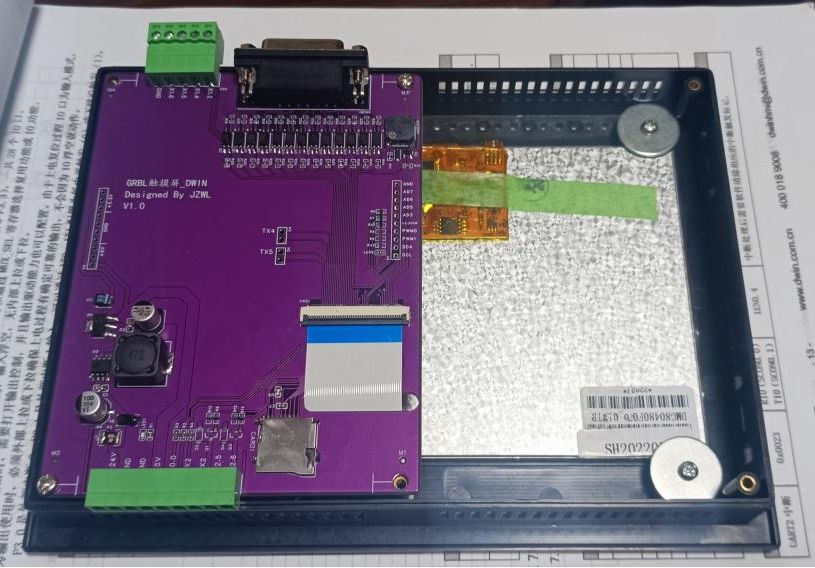
(၂) Backplane diagram

အသိပေးစာ:
1. GRBL ၏ ESP32 သည် ပြုပြင်မွမ်းမံခြင်းမရှိဘဲ မူရင်းဗားရှင်းကို အသုံးပြုနိုင်သည်။
2. Easytron ဖြင့် စခရင် PCB ဖိုင်၏ ဒေါင်းလုဒ် ပူးတွဲပါဖိုင်ကို ဖွင့်ပါ၊ ၎င်း၏ ဇယားကွက်နှင့် PCB ကို တိုက်ရိုက် သက်သေပြနိုင်သည်။
3. kernel ဖိုင်သည် နောက်ဆုံးထွက်ဖြစ်သင့်သည်။ဤပရောဂျက်သည် ပူးတွဲပါဖိုင်တွင် ကာနယ်ဗားရှင်းကို အသုံးပြုပြီး ကာနယ်ကို သီးခြားမွမ်းမံရန် လိုအပ်သည်။
စာတိုက်အချိန်- Jan-10-2023